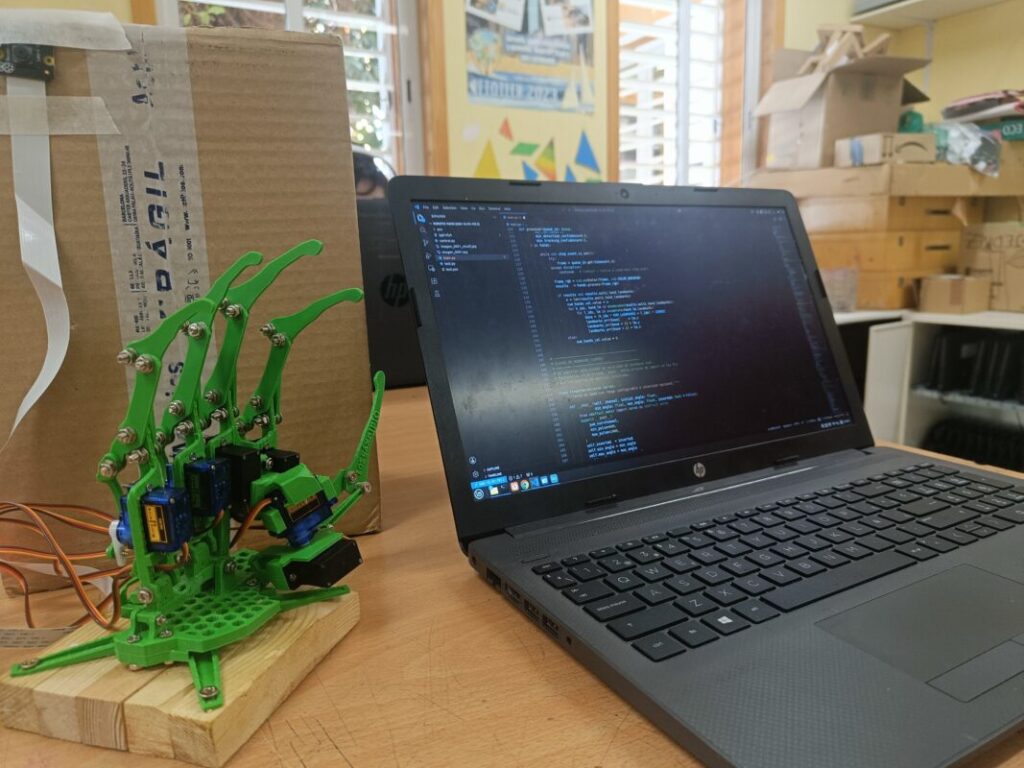
Un brazo robótico fabricado en casa, que copia los movimientos de una mano humana en tiempo real. Eso es lo que Sebastián Mirica, alumno de 1º de Bachillerato, y su equipo han construido este curso en el aula de tecnología.
El dispositivo está íntegramente impreso en 3D. Lleva seis servomotores controlados por una placa PCA9685 y funciona sobre una Raspberry Pi 3+ con cámara integrada. Todo el software lo han escrito ellos, en Python, desde cero.
El desarrollo pasó por tres fases. Primero, secuencias mecánicas básicas: el brazo repitiendo movimientos programados. Después vino lo más complejo: mediante la cámara y algoritmos de visión artificial, el sistema detecta en tiempo real 21 puntos clave de la mano humana (nudillos y yemas) y el brazo replica cada gesto de forma inmediata. En la tercera fase, el equipo programó el juego Piedra, Papel o Tijera: la IA analiza la jugada del usuario y elige de forma autónoma el movimiento ganador.
Lo que han construido no es un experimento de aula. La arquitectura que hay detrás de este brazo es la misma que hoy permite la telecirugía: sistemas en los que un cirujano experto opera a un paciente al otro lado del mundo moviendo sus propias manos frente a un dispositivo como este.
Sebastián y su equipo no han estudiado robótica. Han hecho robótica.